 Loading... Please wait...
Loading... Please wait...
Blog
Recent Posts
CAN FD (Controller Area Network Flexible Data Rate)
Posted by on

This post is an excerpt from our application note Controller Area Network (CAN) Development with ESP32.
CAN FD (Controller Area Network Flexible Data Rate) is an extension of the original CAN bus protocol. It was created to provide increased bandwidth within automotive and industrial networks. It brings application software closer to "real-time" by minimizing delays between instruction and data transfer (latency) and providing higher bandwidth.
This was achieved by overcoming two limitations of Classical CAN. CAN FD allows for data transmission at speeds greater than 1 Mbit/s and supports a payload of up to 64 bytes, as opposed to being limited to 8 bytes. All this is accomplished without changing the CAN physical layer. CAN FD has been estimated to transmit data up to 30 times faster than Classical CAN.
CAN FD also reduces the number of undetected errors by increasing CRC algorithm performance.
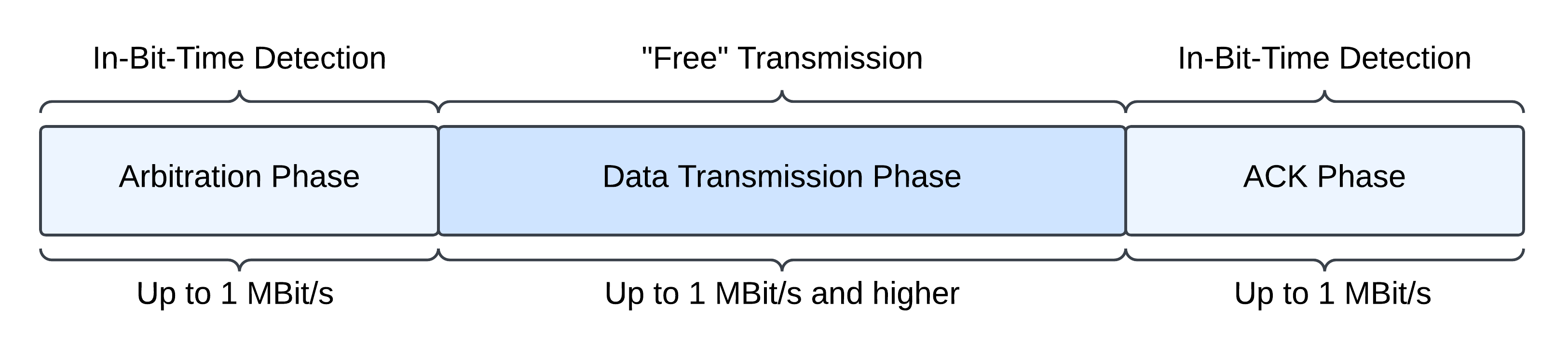
CAN FD data frames can be transmitted with two different bit rates: In the arbitration phase, the bit rate depends on the network topology and is limited to 1 Mbit/sec. In the data phase, the bit rate is limited by the transceiver characteristics. Typical CAN FD transceivers support bit rates of up to 8 Mbit/sec.
Note: The original introduction of CAN FD on the CAN-in-Automation (CiA) website stated that CAN FD “…is compatible with existing CAN 2.0 networks, allowing the new protocol to function on the same network as Classical CAN.” This is not true, as explained in the following chapter. That remark has since been removed.

Teensy 4.0 CAN Bus And CAN FD Training Board
his board features an Arduino-compatible Teensy 4.0 microprocessor system. It serves as a training board for CAN Bus and CAN FD. It comes equipped with four onboard potentiometers, LEDs, an RGB LED, and switches. The board is capable of simulating analog inputs and transmitting the signal to the CAN bus in either Classical CAN or CAN FD format. It is powered by an external +12 VDC feed with reverse voltage protection. External sensors can be connected via the QWIIC connector. More Information...
SAE J1939 Utilizes CAN Bus Message Collision During Bus Arbitration
SAE J1939 is a higher-layer protocol (HLP) based on Controller Area Network (CAN Bus). It provides serial data communications between microprocessor systems (also called Electronic Control Units - ECU) in any heavy-duty vehicles. Everything that has to do with the CAN Bus provides reliability with the maximum possible performance in mind, not only regarding required electrical robustness [...]
Controller Area Network (CAN Bus) - Bus Arbitration
The following is an excerpt from A Comprehensible Controller Area Network by Wilfried Voss. Since a serial communication system such as CAN is based on a two-wire connection between nodes in the network, i.e. all nodes are sharing the same physical communication bus, a method of message/data collision avoidance is mandatory to assure a safe data transfer and to avoid [...]