 Loading... Please wait...
Loading... Please wait...
Recent Posts
Programming Electrac Linear Actuator - ACM, AFM Data Frames
Posted by on

This post represents an excerpt of Thomson Electrac HD Linear Actuator Motion Control per CAN Bus. The application note is available in eBook and Kindle format, and it includes a free downloadable source code. More Information...
In this post, I am explaining the Actuator Control Message (ACM) and Actuator Feedback Message (AFM).
Thomson Electrac Linear Actuator - ACM Design
The ACM data frame (PGN) controls:
- Position Command
- Current Limit
- Speed Command
- Motion Enable Signal
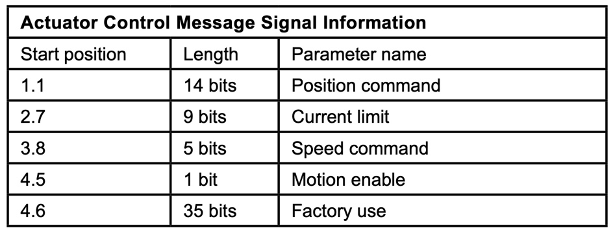
The architecture of the ACM message and its parameters is explained adequately in the user manual.
Reference: Page 24, “5.2.4 SAE J1939 actuator control message (ACM)” in the user manual.
The programming/coding of the actuator control message (ACM) is demonstrated in chapter Building the Actuator Control Message (ACM).
Thomson Electrac Linear Actuator - AFM Interpretation
In turn, the actuator provides feedback per AFM such as:
- Measured Position
- Measured Current
- Running Speed
- Voltage Error
- Temperature Error
- And more...
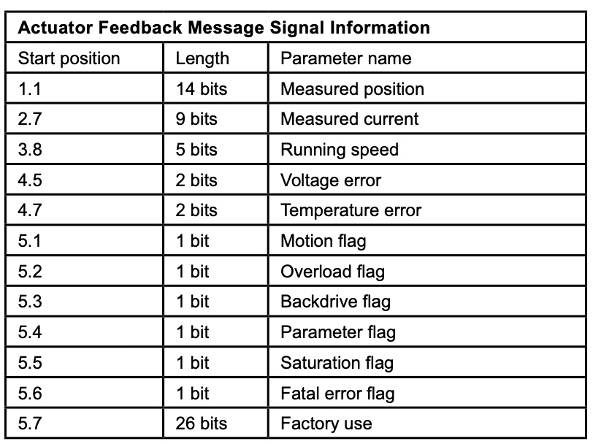
The architecture of the AFM message and its parameters is explained adequately in the user manual.
The programming/coding of the actuator feedback message (AFM) is demonstrated in chapter Handling the Actuator Feedback Message (AFM).

Arduino-Based ECU Development Board With Dual CAN Bus Interface
Leverage the power of an ARM Cortex M3 32-bit processing capability in combination with a dual CAN Bus interface to create your next CAN Bus or SAE J1939 application or prototype. By combining our dual CAN port interface, the Arduino DUE microcontroller, an OBD2 or SAE J1939 cable, and open-source software libraries you are ready to go with powerful a turn-key Arduino-based dual CAN bus solution.