 Loading... Please wait...
Loading... Please wait...
Recent Posts
Turbo CAN Bus, SAE J1939 Board For Raspberry Pi, BeagleBone, Arduino, and Android Systems
Posted by on
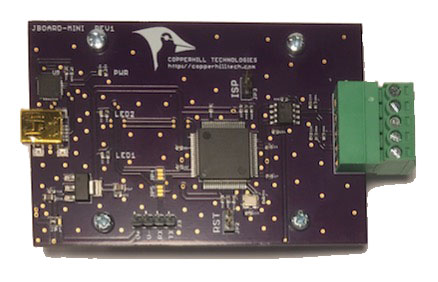
As part of our embedded hardware and software development for CAN (Controller Area Network) based vehicle protocols, the first prototype of the jCOM.CAN.USB, a CAN/J1939 to USB/UART gateway board for embedded solutions, has passed the performance and quality tests successfully, and we are now ready to start production.
The main focus of this board is the support of popular embedded systems such as the Raspberry Pi, BeagleBone, Arduino, but also Android systems.
The targeted date for the release is August of 2016. The pricing, based on a current cost analysis, will be US$69.95 (CAN) and US$89.95 (SAE J1939) for single quantities.
The Turbo Aspect
The major advantage of the jCOM.CAN.USB gateway board is that all CAN/J1939 message processing (e.g. message filtering and protocol features) is accomplished on-chip, thus reducing the burden on the main system. The communication between the gateway board and the main system is accomplished either per USB or UART port (all of the previously mentioned system do provide a UART connection, eliminating the need for a transceiver).
Popular systems such as the Raspberry Pi, BeagleBone, Arduino, etc., while shining through a great price/performance ratio, can be easily overwhelmed by an increased CAN busload (think of updating the content of an LCD at a CAN busload > 80%). The result will be sluggish processing and even loss of CAN data.
The jCOM.CAN.USB gateway board utilizes a dedicated ARM Cortex-M3 processor (without the burden of an operating system) to manage all CAN/J1939 messages. CAN message reception and transmission is interrupt-controlled, assuring proper operation at the highest busload using high baud rates.
The jCOM.CAN.USB gateway board will effectively reduce the amount of data overhead delivered to the host system, while maintaining the highest level of data integrity.
Ease of Programming
In order to deliver the CAN data, we have developed a serial communication protocol between the main system and the USB/UART. The focus was to optimize the amount of serial data, effectively reducing the burden on the host system.
The protocol message frames, containing the CAN data, are delivered per simple COM port access. The protocol is documented in detail to allow easy porting to any host system, and, in addition, we provide C source code for embedded systems.
The source code includes functions for initializing, receiving, and transmitting CAN/J1939 data, eliminating the need to deal with cumbersome CAN controller programming.
jCOM.CAN.USB General Features:
- Full CAN / SAE J1939 Protocol on chip
- Virtually OS independent
- Easily adaptable; just access the COM port
- Works with Raspberry Pi, BeagleBone, Teensy, Arduino, Android Systems
- Protocol is well documented
- C source code available
- Windows tool: jCOM1939 Monitor (for SAE J1939 gateways only)
- Power applied through USB port
- RoHS compliant
- Operating Range: 0...70 C
- Board dimensions (W x L): 52 x 78 ; 2.05" x 3.07"
More detailed information, including data sheet and user manual, are in the making. For the time being, please feel free to contact us.
 A Comprehensible Guide to Controller Area Network by Wilfried Voss represents the most thoroughly researched and most complete work on CAN available in the marketplace.
Controller Area Network (CAN) is a serial network technology that was originally designed for the automotive industry, especially for European cars, but has also become a popular bus in industrial automation as well as other applications. The CAN bus is primarily used in embedded systems, and as its name implies, is a network technology that provides fast communication among microcontrollers up to real-time requirements, eliminating the need for the much more expensive and complex technology of a Dual-Ported RAM.
This book provides complete information on all CAN features and aspects combined with a high level of readability. => Read more...
A Comprehensible Guide to Controller Area Network by Wilfried Voss represents the most thoroughly researched and most complete work on CAN available in the marketplace.
Controller Area Network (CAN) is a serial network technology that was originally designed for the automotive industry, especially for European cars, but has also become a popular bus in industrial automation as well as other applications. The CAN bus is primarily used in embedded systems, and as its name implies, is a network technology that provides fast communication among microcontrollers up to real-time requirements, eliminating the need for the much more expensive and complex technology of a Dual-Ported RAM.
This book provides complete information on all CAN features and aspects combined with a high level of readability. => Read more...