Loading... Please wait...
Loading... Please wait...




)

| Expected release date is Feb 13th 2026 |
Product Description
Free Shipping Within the United States!
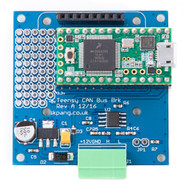
This board is based around the Teensy 4.1 microcontroller and expands its capabilities with multi-CAN bus interfaces, Ethernet connectivity, and a full GNSS module. It is designed for high-performance embedded or vehicle-networked applications.
The Teensy 4.1 is an exceptionally powerful microcontroller development board built around an ARM Cortex-M7 core running at 600 MHz, making it one of the fastest MCUs available for Arduino-style prototyping. It offers an expansive feature set—including 8 MB of flash memory, support for a micro-SD card, a USB host port, and optional Ethernet connectivity—allowing it to scale well beyond hobbyist use into high-performance embedded systems. With 55 total I/O pins (including 42 breadboard-friendly) and both CAN 2.0 and CAN FD controllers built into the chip, it is particularly well suited for applications in robotics, industrial control, automotive networks, and data-heavy real-time tasks.
Key specifications and features:
-
The board includes one Teensy 4.1 module fitted on the carrier board.
-
It offers two Classic CAN ports plus one CAN FD port for flexible vehicle- or machine-network integration.
-
An Ethernet MagJack is included, enabling wired network connectivity.
-
Built-in switching-mode power supply (SMPS) on the board supports an external input of 7 V to 12 V, and includes reverse-polarity protection.
-
A Qwiic connector is fitted for I²C-compatible external sensors, providing easy expansion.
-
The GNSS module is the u-blox NEO-M8M. Interfaces for it include:
-
The board features a USB-C connector for direct PC connection (monitoring/configuration).
-
It includes a coin-cell battery holder (for a CR1225 cell) to maintain backup GNSS functionality.
-
An SMA connector is provided to attach an external GNSS antenna.
-
LEDs on board include a red power LED, and a blue LED indicating the 1PPS GNSS pulse.
-
Although supplied with the NEO-M8M module, other GNSS modules (such as the NEO-M8T timing GNSS) can be fitted on request.
Use-cases and suitability:
This board is ideally suited for advanced automotive or vehicular telemetry applications. With two classic CAN 2.0B ports, one high-speed CAN FD channel, a built-in Ethernet port, and a high-precision GNSS module (the u-blox NEO-M8M), it enables developers to monitor, log and transmit rich vehicle-bus data in real time. For example, a fleet operator could deploy this board in a truck or bus to read multiple ECU networks simultaneously (using the triple CAN channels), log location, speed and route information via the GNSS, and send that data via Ethernet (or over an Internet gateway) for remote diagnostics and predictive maintenance. It also allows for injecting or simulating CAN FD messages to test next-generation EV systems.
In an industrial-automation or IoT gateway context, this board bridges legacy fieldbus networks and modern IP-based infrastructure. For instance, machinery or sensor arrays connected via CAN or CAN FD can feed data into the board, which preprocesses, filters or aggregates the information using the powerful 600 MHz Cortex-M7 core of the underlying Teensy 4.1. The Ethernet interface then delivers the processed data to local servers or cloud dashboards. The on-board GNSS adds another dimension—enabling geo-tagged machine telemetry, asset-tracking functions, or time-synchronised logging across distributed installations. In short, it’s a compact platform for bridging hard-real-time CAN networks with high-bandwidth, standard Ethernet and location aware data.
Documents
Software
- u-center GNSS configuration software...
- Triple CAN-Bus demo sketch...
- Ethernet web server demo sketch…
- GNSS demo on i2c sketch...
- GNSS demo on Serial2 sketch...
 Embedded Ethernet and Internet Complete
Embedded Ethernet and Internet Complete
Harnessing the power of networking in constrained devices, this guide bridges the divide between embedded-system design and internet-enabled communication. It walks developers through the principles of Ethernet and IP networks, carefully tailored to the unique demands of microcontrollers and other small devices—where memory is limited, processing power modest, and every packet matters.
Readers learn not just the theory of TCP/IP, UDP, and web-server operation, but pragmatic hardware and firmware examples that bring networked sensors, actuators, and controllers to life.
By combining circuit-level detail, software algorithm insights, and networking architecture best practices, the book equips engineers to build embedded systems that connect, respond, and interface with applications on the Internet and local networks.
Whether the goal is to serve dynamic web pages from a device, log data using FTP, or design a secure, low-footprint network endpoint, this volume provides a clear roadmap—from the fundamentals of Ethernet frames to the end-to-end implementation of embedded clients and servers. More information...