Loading... Please wait...
Loading... Please wait...
- Home
- Breakout Boards
- CAN Bus Breakout Board 3.3 VDC


)

Product Description
Free Shipping Within the United States!
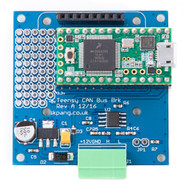
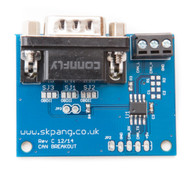
This is a CAN-Bus breakout board using the Texas Instruments SN65HVD231 High Speed CAN Transceiver IC operateing at 3.3v. The CAN output signals (CAN_H, CAN_L) are available on both screw terminal and DB9 connector. The DB9 can be configured for use with a OBDII cable or CAN Analyzer pin-out via solder bridges.
While many popular embedded systems (e.g. mbed LPC1768, Arduino Due, Teensy 3.x, etc.) provide their respective CAN interfaces, these CAN capabilities are per default useless without their respective CAN transceivers. A CAN transceiver is a line driver that converts the controller’s TTL signal to the actual CAN level, which is a differential voltage. The use of differential voltage contributes to the vast reliability of CAN. Out of cost constraints, boards like the Arduino Due and the mbed LPC1768 have no onboard CAN transceivers. Basically, CAN transceivers would add more costs to the board and why pay for it when you don't need it? CAN transceivers, due to power management requirements, come always as a separate chip.
- Texas Instruments SN65HVD231 CAN transceiver
- 3.3v supply
- Supports 1 Mb/s operation
- Implements ISO-11898 standard physical layer requirements
- Up to 112 nodes can be connected
- DB9 and screw terminal connection
- DB9 can be configure for OBDII cable or CAN Analyzer pin-out
- 120R terminating resistor via jumper
The board requires a pin header which is not included.
 A Comprehensible Guide to Controller Area Network
A Comprehensible Guide to Controller Area Network
This Book represents the most thoroughly researched and most complete work on CAN available in the marketplace.
Controller Area Network (CAN) is a serial network technology that was originally designed for the automotive industry, especially for European cars, but has also become a popular bus in industrial automation as well as other applications.
The CAN bus is primarily used in embedded systems, and as its name implies, is a network technology that provides fast communication among microcontrollers up to real-time requirements, eliminating the need for the much more expensive and complex technology of a Dual-Ported RAM.
This book provides complete information on all CAN features and aspects combined with a high level of readability.