 Loading... Please wait...
Loading... Please wait...
Recent Posts
SAE J1939 Transport Protocol (TP) Functions
Posted by on
The following is an excerpt from A Comprehensible Guide To J1939 by Wilfried Voss.

Even though extremely useful in passenger cars and small industrial applications, CAN alone was not suitable to meet the requirements of truck and bus communications, mainly since its communication between devices is limited to only 8 bytes per message. However, it is possible to extend the size of a CAN message by implementing additional software, i.e., so-called higher layer protocols. J1939 is such a higher-layer protocol, and it supports up to 1785 bytes per message.
To support a size of more than 8 bytes, the message needs to be packaged into a sequence of 8-byte size messages. Consequently, the receiver of such a multi-packet message must re-assemble the data. Such functions are defined as Transport Protocol (TP) Functions, and they are also described in SAE J1939/21. The two major parts of the TP Functions are Message Packaging & Reassembly and Connection Management. Also, the Transport Protocol Functions handle flow control and handshaking features for destination-specific transmissions.
Message Packaging and Reassembly
Certain parameter groups may require more than the 8 data bytes supported by the CAN standard. The SAE J1939 standard, namely the Transport Protocol Function, supports message lengths up 1785 bytes. In case a program group requires more than 8 data bytes (9…1785 bytes) and is defined as multi-packet capable, the data will be packaged into a series of CAN data frames.
In order to package CAN messages into a sequence of up to 1785 messages (as well as to re-assemble the CAN frames into one data package) the J1939 Transport Protocol defines the following:
- Each multi-packet message is being transmitted by using a dedicated Data Transfer PGN (60160, TP.DT = Transfer Protocol Data Transfer), i.e. all message packets will have the same ID.
- The flow control is managed by another dedicated PGN (60146, TP.CM = Transfer Protocol Communication Management).
- The message length must always be 8 bytes (DLC = 8).
- The first byte in the data field contains a sequence number that ranges from 1 to 255.
- The remaining 7 bytes are filled with the data of the original long (> 8 bytes) message.
- All unused data bytes in the last package are being set to FFhex.
The actual total message length is defined by the corresponding Parameter Group (See also chapter Multi-Packet Broadcast).
The method of using a sequence number plus the remaining seven data bytes yields a total of (255 packages times 7 bytes/package) 1785 bytes per multi-packet message.
The following pictures demonstrate the use of the CAN data field, including the sequence number and the packaging of multiple CAN messages.

CAN Data Frame with Sequence Number
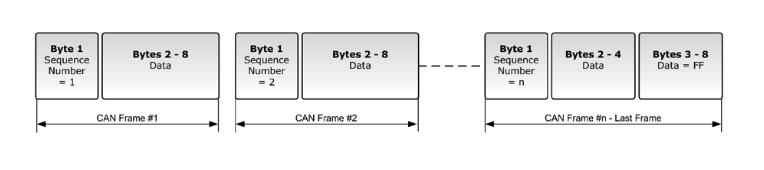
Example of Multi-Package Sequence
The data packages are re-assembled in the order of their sequence number and the final data package can then be passed to the application layer.

SAE J1939 ECU Simulator Board With USB Port
The jCOM.J1939.USB gateway board is a high-performance, low-latency vehicle network adapter for SAE J1939 applications. It allows any host device with a USB COM port to monitor SAE J1939 data traffic and communicate with the SAE J1939 vehicle network.
The board supports the full SAE J1939 protocol according to J1939/81 Network Management (Address Claiming) and J1939/21 Transport Protocol (TP). It is also supported by an extensive programming interface for Windows and Linux/Ubuntu applications, including full C/C++/C# source code for short time-to-market developments.
The strength of the board lies in the fact that the entire SAE J1939 protocol, including all timing requirements, is stored on-chip, thus taking the burden off the main system. The board uses a USB COM port to communicate with the main system, i.e. all data transfer is handled through a standard COM port access.
The communication protocol between the board and the main system is well documented and thus allows a porting to any computer system with a USB connection. Working source code libraries exist for Windows (C# under Visual Studio 2012/2013), Linux and its derivatives (C++ using Code::Blocks), and Raspberry Pi (C using the standard gcc compiler).