 Loading... Please wait...
Loading... Please wait...
Recent Posts
SAE J1939 Programming with Arduino - Introduction to Controller Area Network
Posted by on
This post is part of a series about SAE J1939 ECU Programming & Vehicle Bus Simulation with Arduino.

Controller Area Network (CAN Bus) is a serial network technology that was originally designed for the automotive industry, especially for European cars, but has also become a popular bus in industrial automation as well as other applications.
The CAN Bus is primarily used in embedded systems, and as its name implies, is a network technology that provides fast communication among microcontrollers up to real-time requirements, eliminating the need for the much more expensive and complex technology of a Dual-Ported RAM.
CAN Bus is a two-wire, half duplex, high-speed network system, that is far superior to conventional serial technologies such as RS232 in regards to functionality and reliability and yet CAN implementations are more cost effective.
While, for instance, TCP/IP is designed for the transport of large data amounts, CAN is designed for real-time requirements and with its 1 MBit/sec baud rate can easily beat a 100 MBit/sec TCP/IP connection when it comes to short reaction times, timely error detection, quick error recovery and error repair.
CAN Bus networks can be used as an embedded communication system for microcontrollers as well as an open communication system for intelligent devices. Some users, for example in the field of medical engineering, opted for CAN because they have to meet particularly stringent safety requirements. Similar requirements had to be considered by manufacturers of other equipment with very high safety or reliability requirements (e.g. robots, lifts and transportation systems).
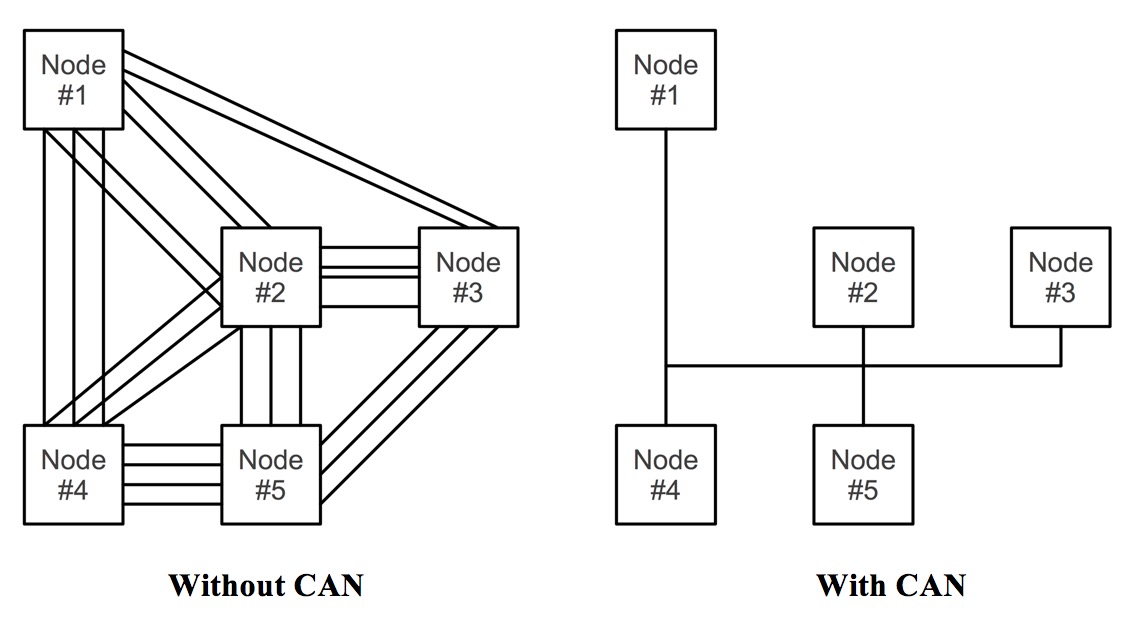
The greatest advantage of Controller Area Network lies in the reduced amount of wiring combined with an ingenious prevention of message collision (meaning no data will be lost during message transmission).
The following shows a need-to-know overview of CAN’s technical characteristics.
Controller Area Network
- Is a serial networking technology for embedded solutions.
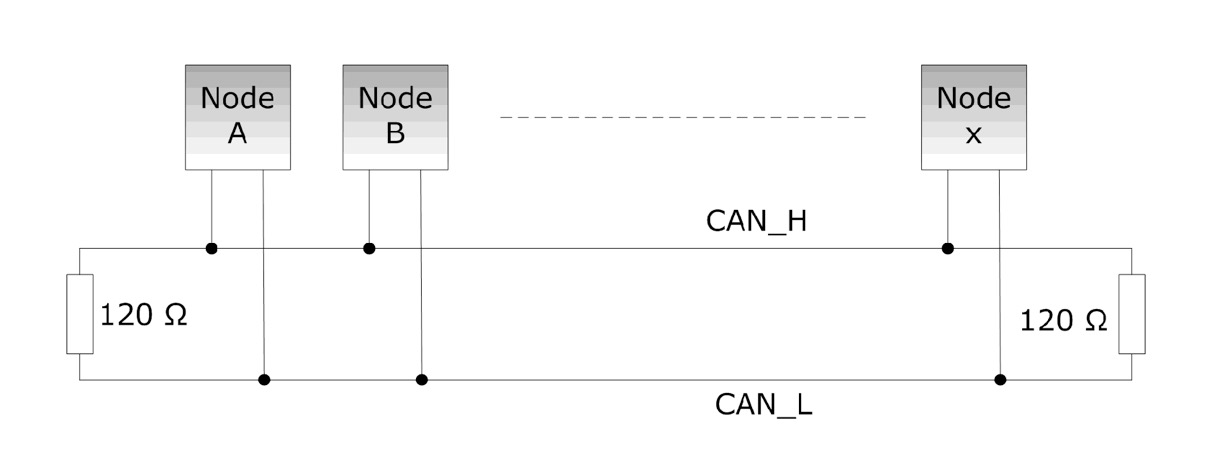
- Needs only two wires named CAN_H and CAN_L.
- Operates at data rates of up to 1 Megabit per second.
- Supports a maximum of 8 bytes per message frame.
- Does not support node IDs, only message IDs. One application can support multiple Message IDs.
- Supports message priority, i.e. the lower the message ID the higher its priority.
- Supports two message ID lengths, 11-bit (standard) and 29-bit (extended).
- Does not experience message collisions (as they can occur under other serial technologies).
- Is not demanding in terms of cable requirements. Twisted-pair wiring is sufficient.
Note: For more detailed information on CAN, please refer to the official CiA/Bosch specification or to A Comprehensible Guide to Controller Area Network.

SAE J1939 has become the accepted industry standard and the vehicle network technology of choice for off-highway machines in applications such as construction, material handling, and forestry machines. J1939 is a higher-layer protocol based on Controller Area Network (CAN). It provides serial data communications between microprocessor systems (also called Electronic Control Units - ECU) in any kind of heavy duty vehicles. The messages exchanged between these units can be data such as vehicle road speed, torque control message from the transmission to the engine, oil temperature, and many more.
A Comprehensible Guide to J1939 is the first work on J1939 besides the SAE J1939 standards collection. It provides profound information on the J1939 message format and network management combined with a high level of readability.