 Loading... Please wait...
Loading... Please wait...
Recent Posts
Guide To SAE J1939 - Controller Area Network and J1939
Posted by on
The following is an excerpt from A Comprehensible Guide To J1939 by Wilfried Voss.

The standard CAN message frame uses an 11-bit message identifier (CAN 2.0A), which is sufficient for the use in regular automobiles and any industrial application, however, not necessarily for off-road vehicles.
The Society of Automotive Engineers (SAE) Truck and Bus Control and Communications Subcommittee had developed a family of standards concerning the design and use of devices that transmit electronic signals and control information among vehicle components. As a result, the higher layer protocol SAE J1939, based on CAN, was born, which was required to provide some backward-compatible functionality to older RS485-based communication protocols (J1708/J1587).
In order to serve these demands, the CAN standard needed to be enhanced to support a 29 bit message identifier. The ISO 11898 amendment for an extended frame format (CAN 2.0B) was introduced in 1995.
The 29 bit message identifier consists of the regular 11 bit base identifier and an 18 bit identifier extension. The distinction between CAN base frame format and CAN extended frame format is accomplished by using the IDE bit inside the Control Field. A low (dominant) IDE bit indicates an 11 bit message identifier, a high (recessive) IDE bit indicates a 29 bit identifier.
An 11 bit identifier (standard format) allows a total of 211 (= 2048) different messages. A 29 bit identifier (extended format) allows a total of 229 (= 536+ million) messages.
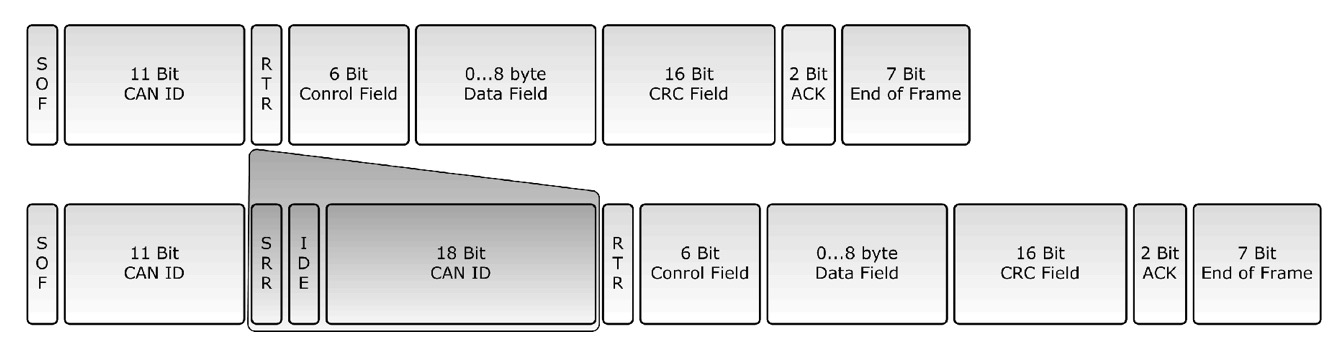
The above picture shows a comparison between a standard CAN data frame with an 11-Bit identifier and a CAN data frame in extended format (29-Bit identifier). Both frames contain an Identifier Extension Bit (IDE)[1], which is at low level for the standard frame and at high for the extended data frame. CAN controllers must be designed in a way that they check the IDE in order to distinguish between the two possible frame formats.
Note: Both formats, Standard (11 bit message ID) and Extended (29 bit message ID), may co-exist on the same CAN bus. During bus arbitration the standard 11 bit message ID frame will always have higher priority than the extended 29 bit message ID frame with identical 11 bit base identifier and thus gain bus access
The Extended Format has some trade-offs: The bus latency time is longer (minimum 20 bit-times), messages in extended format require more bandwidth (about 20 %), and the error detection performance is reduced (because the chosen polynomial for the 15-bit checksum is optimized for frame length up to 112 bits).
[1] The IDE in an 11-Bit standard frame is embedded in the Control Field.

SAE J1939 ECU Simulator Board With USB Port
The jCOM.J1939.USB gateway board is a high-performance, low-latency vehicle network adapter for SAE J1939 applications. It allows any host device with a USB COM port to monitor SAE J1939 data traffic and communicate with the SAE J1939 vehicle network.
The board supports the full SAE J1939 protocol according to J1939/81 Network Management (Address Claiming) and J1939/21 Transport Protocol (TP). It is also supported by an extensive programming interface for Windows and Linux/Ubuntu applications, including full C/C++/C# source code for short time-to-market developments.
The strength of the board lies in the fact that the entire SAE J1939 protocol, including all timing requirements, is stored on-chip, thus taking the burden off the main system. The board uses a USB COM port to communicate with the main system, i.e. all data transfer is handled through a standard COM port access.
The communication protocol between the board and the main system is well documented and thus allows a porting to any computer system with a USB connection. Working source code libraries exist for Windows (C# under Visual Studio 2012/2013), Linux and its derivatives (C++ using Code::Blocks), and Raspberry Pi (C using the standard gcc compiler).