 Loading... Please wait...
Loading... Please wait...
Blog
Recent Posts
Extending ESP32 Functionality by Using Raspberry Pi HATs
Posted by on
The ESP32 processor integrates peripherals such as UART, CAN Bus, WIFI, and Bluetooth, allowing a wide range of applications. Its low price adds to its popularity.

Various ESP32 development boards, such as the ESP32-WROOM-32, are available in the market, as shown to the left. However, compared to popular systems like the Raspberry Pi or Arduino, the hardware resources, i.e., additional peripherals, are limited.
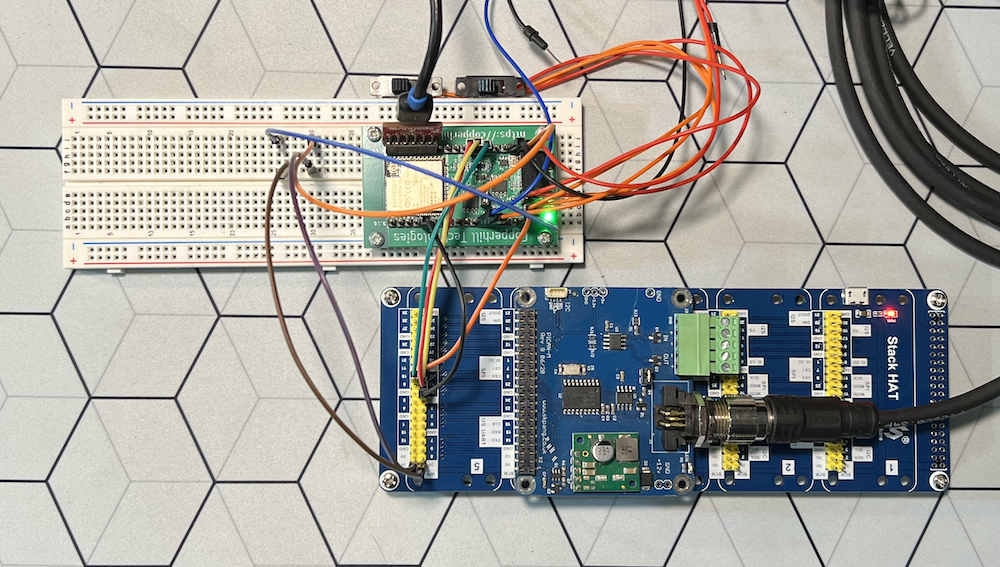
Consequently, tapping into the vast resources of the Raspberry Pi or Arduino system makes sense. In this post, I am using several of our Raspberry Pi CAN boards and accessing them per one of our ESP32 modules. This post's method applies to any other ESP32 module that provides external SPI and UART signals.
Note: For more detailed information on the ESP32 SPI interface, please refer to another post, ESP32 Triple CAN Bus Application Through Adding Two MCP2515 Ports.
Connecting Arduino Shields to ESP32
This part is for those curious enough to ask why I didn't use the vast Arduino hardware resources (shields): As I mentioned in the above-referenced post, the ESP32 uses a 3.3 VDC SPI signal level, which will not work with the 5 VDC signal level as used on Arduino shields. For the same reason, most Arduino shields will not work with the Arduino Due, which also uses 3.3 VDC.
Connecting Raspberry Pi PICAN HATs to ESP32
Please be aware that each ESP32 module might have different assignments for the SPI signals, i.e., MOSI, MISO, SCLK, and CS. Even the nomenclature of these signals may differ. But, as demonstrated below, the wiring is fairly straightforward. The below diagram shows the necessary SPI signals on an ESP32-WROOM-32 development board as well as the RPi's 40-pin GPIO header:
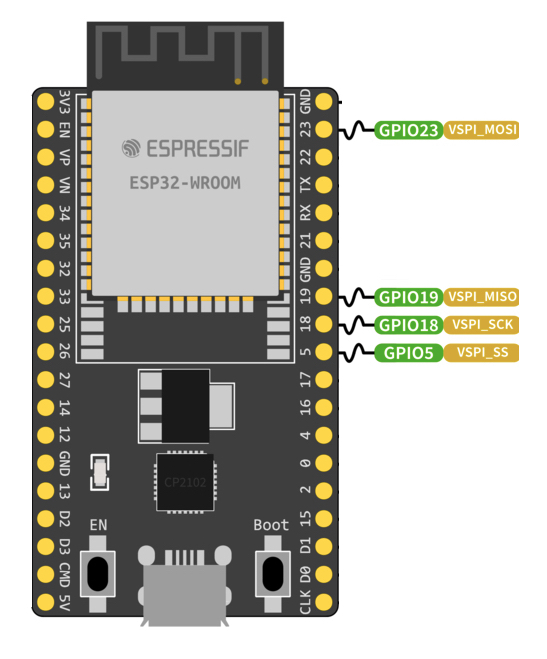

The wiring is fairly easy:
ESP32 ----> RPi HAT
----------------------------------------
SCK ----> SCK SPI Data Output
MISO ----> MISO SPI Clock Input
MOSI ----> MOSI SPI Data Input
CS/SS ----> CS Chip Select
Again, refer to above referenced post for more information.
PICAN CAN Bus HAT for Raspberry Pi
The PICAN series of boards provides Controller Area Network (CAN) Bus capabilities for the Raspberry Pi. It comes with an easy-to-install SocketCAN driver, programming can be accomplished in C or Python, and we provide many programming samples and further references.
The PICAN series supports many hardware variants, including single—or dual-channel ports, isolated or non-isolated, Classical CAN or CAN FD, and NMEA 2000, plus additional features such as GPS, Gyro, Accelerometer, and Real-Time Clock (RTC).
All boards supporting Classical CAN use the MCP2515 CAN Bus controller, so I could access all boards using the same software, including the PICAN DUO boards. The software allows multiple instances to access more than one SPI port. However, the RPi's GPIO header provides only two CS (Chip Select) signals, thus limiting the number of SPI ports to two.
The image on top of the page shows a setup with the PICAN-M - NMEA 0183 and NMEA 2000 HAT for Raspberry Pi. The NMEA 2000 port is controlled by the MCP2515, while the NME 0183 port is connected to the RPi's UART0_TX, and UART0_RX signals.
 Electronics Projects with the ESP8266 and ESP32: Building Web Pages, Applications, and WiFi Enabled Devices
Electronics Projects with the ESP8266 and ESP32: Building Web Pages, Applications, and WiFi Enabled Devices
Copperhill Technologies highly recommends using this book for your wireless application projects. Yes, many good books and free online resources are available these days, but this is the book we are using. It made our approach to Bluetooth, BLE, and WIFI a breeze. Programming wireless applications without hassles was fun, and we will share them on this web page.
Projects throughout the book utilize the wireless functionality and processing power of the ESP microcontrollers. Projects are built in the Arduino IDE, so you don't need to download other programming software. In addition, mobile apps are now ubiquitous, making the app build projects of the book very relevant, as are the web page design projects.
In Electronics Projects with the ESP8266 and ESP32, you'll see how easy and practical it is to access information over the internet, develop web pages, build mobile apps to remotely control devices with speech recognition, or incorporate Google Maps in a GPS route tracking app. More Information...
Installing python-can on the Raspberry Pi
This post demonstrates the steps required to install python-can on the Raspberry Pi for use with PiCAN2, PiCAN3, PiCAN-M CAN Bus HATs. First make sure the driver is installed. See:PiCAN2, PiCAN3, and PiCAN-M Driver Installation for Raspberry Pi...Now install python-can: pip3 install python-can Check there is no error. You can now initialize the CAN interface: sudo /sbin/ip link set can0 [...]
PiCAN2, PiCAN3, and PiCAN-M Driver Installation for Raspberry Pi
This post provides you a brief overview on the steps required to install the software driver on the Raspberry Pi for use with the PiCAN2, PiCAN3, and PiCAN-M CAN Bus HATs, including the dual-port and SMPS versions. Please refer also to the board's user manual. Start by creating a new SD card image with the Raspberry Pi [...]
Thermocouple Measurement HAT Adds Industrial Temperature Measurement To The Raspberry Pi Platform
Measurement Computing Corporation has announced the release of their MCC 134 thermocouple measurement HAT for Raspberry Pi. The MCC 134 brings industrial temperature measurement capabilities to the vastly popular Raspberry Pi platform. The device comes with four thermocouples (TC) inputs capable of measuring popular TC types, such as J, K, R, S, T, N, E, and B. [...]
PiCAN2 CAN Bus HAT for Raspberry Pi - Getting Access To The 40-pin GPIO Header
In the past, we had received a number of inquiries regarding the PiCAN2's 40-pin GPIO header, which is designed in a way that it prohibits access to unused GPIOs. Besides the power supply, the PiCAN2 board (one CAN port) itself uses only 6 signals, while the remaining signals cannot be accessed when the board is [...]
PiCAN2 CAN Bus Board for Raspberry Pi - Functionality Test
The PiCAN2 board provides Controller Area Network (CAN) Bus capabilities for the Raspberry Pi. It uses the Microchip MCP2515 CAN Bus controller with MCP2551 CAN Bus transceiver. Connections are made via a 4-way screw terminal or DSUB-9 connector. This board is also available with a 5VDC/1A SMPS (switch mode power supply) that can power both the Pi and [...]
PiCAN2 Duo CAN Bus Board for Raspberry Pi - Functionality Test
The PiCAN2 DUO board provides two independent CAN Bus interfaces for the Raspberry Pi. It uses the Microchip MCP2515 CAN Bus controller with MCP2551 CAN Bus transceiver. Connections are made via a 4-way screw terminal. This board is also available with a 5VDC/1A SMPS (switch mode power supply) that can power both the Pi and the [...]