Loading... Please wait...
Loading... Please wait...


)
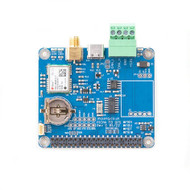
PiCAN FD with GPS/GNSS ublox NEO-M8U Untethered Dead Reckoning with 3D sensors for Raspberry Pi

Product Description
Free Shipping Within the United States!
The PiCAN FD board is equipped with the u-blox NEO-M8U GPS/GNSS receiver. The NEO-M8U introduces u-blox’s Untethered Dead Reckoning (UDR) technology, providing continuous navigation without requiring speed information from the vehicle. This innovative technology extends the benefits of dead reckoning to applications that previously relied solely on GNSS, while significantly reducing installation costs for aftermarket dead-reckoning solutions.
The advantages of UDR become particularly apparent in poor signal conditions. It provides continuous positioning in urban environments, even when antennas are installed inside the vehicle. Useful positioning performance is maintained during complete signal loss, such as in parking garages and short tunnels. In addition, positioning begins immediately when power is applied to the module, before the first GNSS fix is available.
The NEO-M8U can be installed in any orientation within the vehicle without configuration. Since no electrical connection to the vehicle is required, and all necessary accelerometer and gyroscope sensors are integrated on-board, the module provides a fully self-contained solution for rapid product development with reliable and consistent performance.
The antenna is connected through a standard SMA connector.
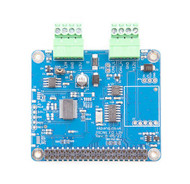
CAN and CAN FD connectivity are provided by the Microchip MCP2518FD controller. An easy-to-install SocketCAN driver allows programming in C or Python. An optional 3A SMPS module can power both the PiCAN FD GPS/GNSS board and the Raspberry Pi from a 7 V to 24 V external power source.
CAN FD Features
- Microchip MCP2518FD CAN Controller
- Arbitration bit rate up to 1 Mbps
- Data bit rate up to 8 Mbps
- CAN FD controller modes:
- Mixed CAN 2.0B and CAN FD mode
- CAN 2.0B mode
- High-speed SPI interface (10 MHz)
- 120 Ω terminator ready
- LED indicator (GPIO04)
- Four fixing holes compliant with the Raspberry Pi HAT standard
- SocketCAN driver, appears as can0 to applications
- RX interrupt on GPIO25
- Fix status LED
NEO-M8U Features
- 72-channel u-blox M8 engine
- GPS/QZSS L1 C/A
- GLONASS L1OF
- BeiDou B1
- SBAS L1 C/A: WAAS, EGNOS, MSAS
- Galileo-ready E1B/C
- USB-C, I2C, and UART communication
- SMA antenna connection
- Compatible with u-center software (requires a Windows PC via USB-C)
- Time Pulse LED
The UDR feature of the NEO-M8U is intended for use in motor vehicles and motorcycles.
u-blox’s proprietary Untethered Dead Reckoning (UDR) solution uses an integrated Inertial Measurement Unit (IMU). IMU data and GNSS signals are processed together to provide accurate and continuous positioning in GNSS-challenged environments, such as urban canyons, while maintaining useful positioning performance during complete GNSS outages, including tunnels and parking garages.
The NEO-M8U combines GNSS and IMU measurements and calculates position solutions at rates of up to 2 Hz. These solutions are available through standard NMEA messages, UBX-NAV-PVT, and related messages. The High Navigation Rate output message (UBX-HNR-PVT) extends these results with IMU-only data, providing accurate, low-latency position solutions at rates of up to 30 Hz.
Dead reckoning enables navigation to begin immediately after power is applied to the module, before a GNSS fix has been established, provided all of the following conditions are met:
- The vehicle has not been moved while the module was unpowered.
- At least a dead-reckoning fix was available during the vehicle’s previous use.
- A backup power supply has been available to the module since the vehicle was last used.
If no backup supply is available, the save-on-shutdown feature can be used. Required information is stored in flash memory and restored upon restart.
For post-processing applications, sensor data is available through the UBX-ESF-MEAS and UBX-ESF-RAW (high-rate) messages. Each message includes a measurement timestamp.
Documents
- Schematic...
- User guide...
- NEO-M8U summary...
- NEO-M8U datasheet...
- u-blox Protocol Specification...
- u-blox UDR white paper...
- u-blox u-center software downlaod...
 Little Blue Dot: How GPS Shaped the Modern World
Little Blue Dot: How GPS Shaped the Modern World
GPS has become so deeply woven into daily life that most of us rarely think about it. Gone are the days of unfolding paper maps and wondering whether we missed a turn. Today, a constellation of satellites guides everything from navigation and logistics to smartphones and emergency services.
Little Blue Dot explores the remarkable journey of GPS from its origins as a Cold War military technology to one of the most important infrastructures of the modern world. Investigative reporter Katherine Dunn traces its development through the Space Race, military conflicts, and the rise of global connectivity, revealing how GPS transformed the way we navigate, work, and understand our place in the world.
The book also examines the growing vulnerabilities of GPS, its role in international politics, and what its evolution can teach us about society’s dependence on emerging technologies such as artificial intelligence. Insightful and engaging, Little Blue Dot offers a compelling look at a technology that quietly shapes modern life.