 Loading... Please wait...
Loading... Please wait...
Recent Posts
Raspberry Pi With CAN Bus Or SAE J1939 Turbo Interface Board
Posted by on
 A note upfront: The CAN interface board for the Raspberry Pi as described in the following, specifically the firmware code, is under current development. The hardware is currently in production, and the release is targeted for the end of February 2017.
A note upfront: The CAN interface board for the Raspberry Pi as described in the following, specifically the firmware code, is under current development. The hardware is currently in production, and the release is targeted for the end of February 2017.
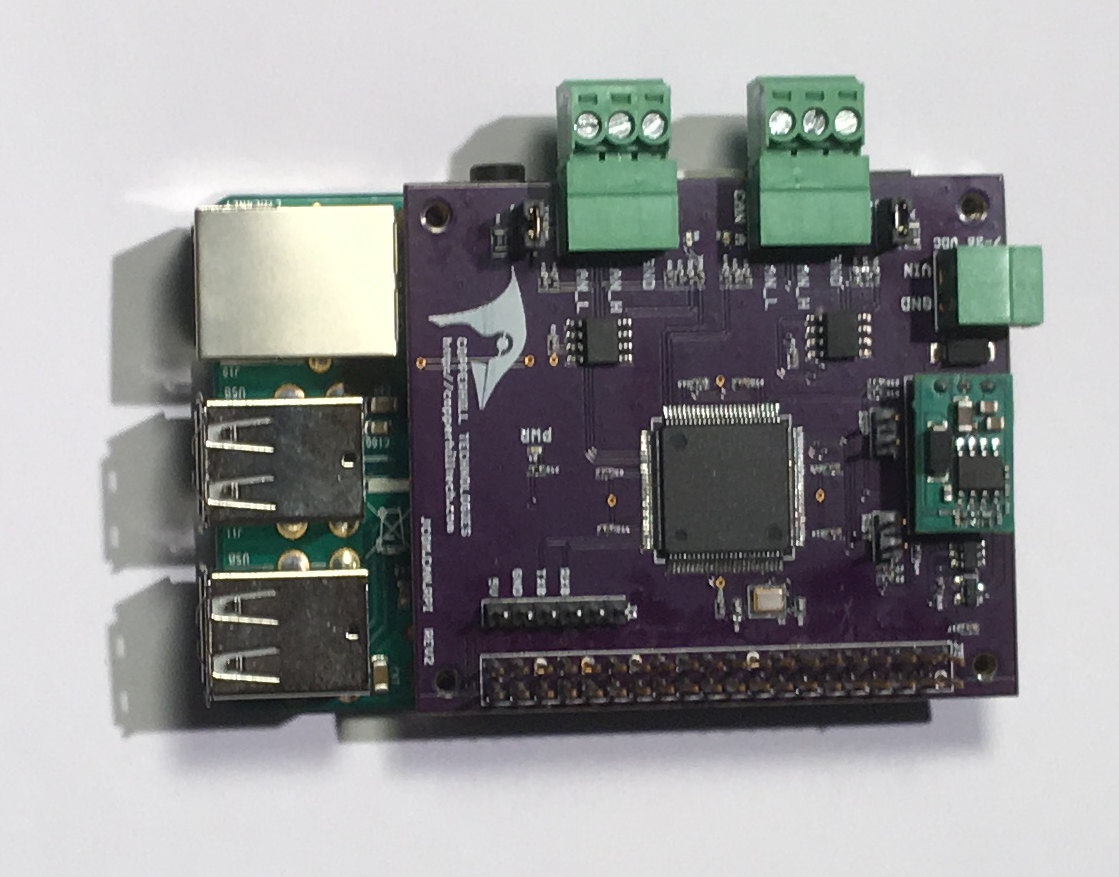
If you have a special interest in running the SAE J1939 protocol on the Raspberry Pi, please refer to my post SAE J1939 ECU Simulator And Data Monitor for Raspberry Pi. While the solution as introduced in this post refer to an external J1939 board, we have taken the next step and developed a board that fits directly onto the RPi. In addition, the board was also designed to support two CAN ports, and, in order to satisfy industrial and automotive requirements, there is an option for an extended input power range of 7 to 36 VDC.
We will use the board's dual-port capability to create a regular CAN Bus interface for the Raspberry Pi. The targeted list prices are:
- jCOM.CAN.RPi - Dual CAN Bus Interface for Raspberry Pi: US$59.95
- jCOM.CAN.RPi - Dual CAN Bus Interface for Raspberry Pi with extended input power range: US$69.95
- jCOM.J1939.RPi - SAE J1939 Interface for Raspberry Pi: US$64.95
- jCOM.J1939.RPi - SAE J1939 Interface for Raspberry Pi with extended input power range: US$74.95
What is the "Turbo" Aspect?
The jCOM.CAN.RPi board integrates an 100 MHz ARM Cortex-M3 with two CAN transceivers and a UART connection to the Raspberry Pi's serial port (COM0). The processor, acting as either a CAN or SAE J1939 gateway, receives and processes all CAN/J1939 data frames, including message filtering and time-stamp creation, thus reducing the processing burden on the Raspberry Pi. The processed data includes the message ID, data, priority, and time-stamp. The UART connection operates at baud rates, closely matching the standard SAE J1939 speed (250kbit/sec) or maximum CAN rate (1 Mbit/sec)..
The jCOM.CAN.RPi board allows the Raspberry Pi to run your CAN/J1939 application comfortably even at high bus load, without slowing down your application responses. All this is supported by an extensive programming library (in C source code) and sample code.
Possible applications include:
- SAE J1939/CAN Bus Gateway and Protocol Converter
- SAE J1939/CAN BusBridge (connecting 2 CAN/J1939 networks)
- SAE J1939/CAN Bus Analyzer (in combination with a suitable Windows program)
- SAE J1939/CAN Bus Data Monitoring
- SAE J1939/CAN Bus ECU Prototyping
Features
- Two CAN ports with three-pin terminal connector
- Extended input power range of 7 VDC to 36 VDC (optional)
- 3 LEDS (1 x Power, 2 x CAN Activity)
- Termination resistor switchable per jumper
- Well documented library and sample code
- Interface Functionality:
- Full on-chip CAN data processing
- Full on-chip SAE J1939 Protocol Stack
For more information, please feel free to contact us through the Contact Us page on this website in case you have questions or comments.