 Loading... Please wait...
Loading... Please wait...
Recent Posts
CAN FD Controller Board With High-Speed CAN Transceiver And SPI interface
Posted by on
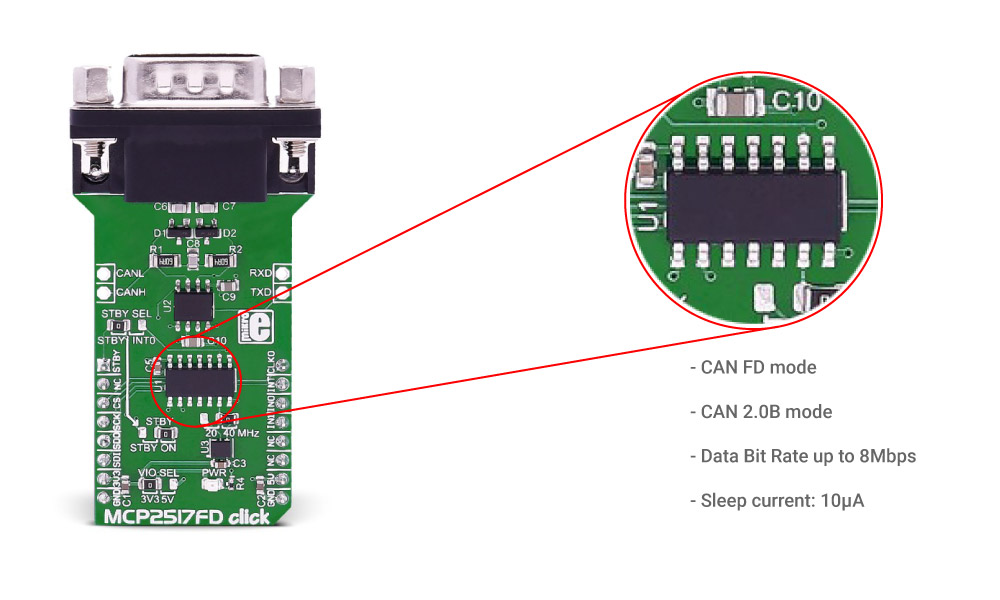
Microchip announced their MCP2517FD, a stand-alone CAN FD controller, which allows designers a simplified path to upgrade from standard CAN to CAN FD. The CAN FD controller provides an SPI interface to link it to the host controller. The CAN FD protocol offers higher data rates and payloads up to 64 byte. The MCP2517FD can be used with any micro-controller featuring SPI connectivity. Since the adoption and transition to CAN FD is in the beginning stages, there are a limited number of CAN FD capable MCUs available today. The stand-alone chip allows system designers to enable CAN FD functionality by adding only one external component while continuing to utilize the majority of their design.
The MCP251XFD CAN FD board in combination with the MCP2517FD click board provides an evaluation board for implementing a CAN FD design. In addition, a firmware API written in C is available for rapid application development. The click requires both 3.3V and 5V power supply. It communicates with the target microcontroller through the SPI interface, with additional functionality provided by the following pins on the mikroBUS™ socket: AN, PWM, INT, TX and RX.
MPC2517FD Features
- Conforms to ISO11898-1:2015
- Supports both CAN 2.0B and CAN FD
- Arbitration Bit Rate up to 1 Mbps
- Data Bit Rate up to 8 Mbps
- Up to 20MHz SPI Clock Speed
- 31 FIFOs configurable as transmit or receive
- 32 Flexible Filter and Mask Objects
- One Transmit Queue
- 32-bit Time Stamp
- Bus Health Diagnostics and Error Counters
- VDD: 2.7V-5.5V
- Active Current Max: 12mA @ 5.5V, 40 MHz CAN Clock
- Sleep Current: 10uA, Typical
- Temperature Range: -40C to +150C
- Packages: VDFN14 (Wettable Flanks), SOIC14
More Information
- MCP2517FD External CAN FD Controller with SPI Interface Data Sheet (PDF)...
- MCP2517FD CAN FD Controller Module Family Reference Manual (PDF)...
- MCP2517FD click...
 Implementing Scalable CAN Security with CANcrypt: Authentication and encryption for CANopen, J1939 and other Controller Area Network or CAN FD protocols
Implementing Scalable CAN Security with CANcrypt: Authentication and encryption for CANopen, J1939 and other Controller Area Network or CAN FD protocols
When the Controller Area Network (CAN) was designed, security was not a requirement. The primary usage of CAN was considered closed; possible intruders or attackers would simply not get physical or remote access to the network. However, today it is more and more common that devices connected to a CAN system also have connections to other networks, including the Internet.
Recent car hacks have shown that attackers may get access to CAN systems. Without strong security features, an attacker automatically gains full access to everything connected, allowing active control commands to be recorded and replayed. In this book we examine which options developers of CAN based systems realistically can use to provide adequate security features.
What can we do - without using heavy-weight security features? What can we do - to detect possibly injected messages? What can we do - without any hardware change? What can we do - with minimal software change? The CANcrypt protocol and software is introduced as a scalable security solution for the Controller Area Network.